PennApps 2016 - 3D Scanner
PennApps is a semiannual hackathon hosted by the University of Pennsylvania’s engineering department. I joined a team of my friends and we built a 3D scanner over a weekend in January for the competition. We designed the scanner in solidworks and wrote the code for it in ROS (Robot Operating System). The scanner essentially had an object on a turntable which was scanned along two planes/axes by LIDAR sensors. This produced two separate Point Cloud Files which were merged to create our 3d image. The scanner got us into the final 10 at the competition and also won us an award for our use of rapid prototyping.
- Inspiration: We all have experience with 3d printers and would often print pieces like phone cases or tool holders. However, in order to replicate these objects we’d need to take detailed measurements, and then CAD the parts which would all be far too tedious for the task. So we decided to create our own 3d scanner.
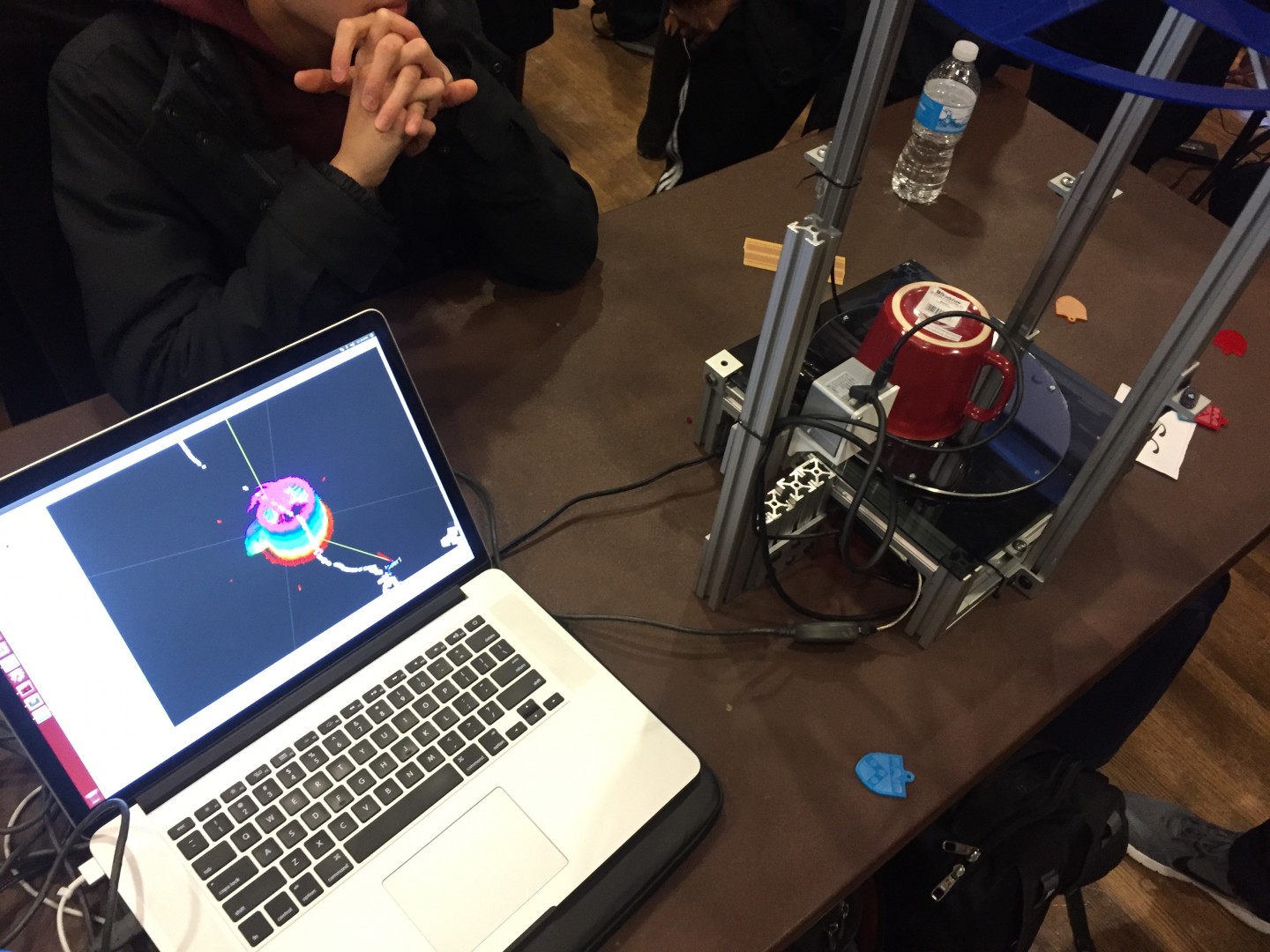
- What it does: You place an object on the motorized turn table, and two LIDAR create a 3d model of the object and export it into MeshLab
- How we built it: We used ROS to control the motor, recieve the LIDAR scans and project them into the world frame. We used PCL to process filter and export the point cloud. The structure is built from 80/20 framing. The turn table, bottom and top tables, were laser cut. The side LIDAR mount was 3d printed with makerbots, and the top Lidar mount was also laser cut.
- Software: C++, Python, ROS, PCL, Linux
- Hardware: SolidWorks, 3D Printing, Laser Cutting
- Developed At: PennApps XIII - Spring 2016 with Raphael Chang, Joshua Yuan, and Anurag Makineni
- Devpost